本学の注目研究を毎月1つずつ紹介します。
【2021年7月】
橋梁等の鋼構造物に吸着した状態で点検作業が可能なドローンの開発
(機械工学系
東善之 助教)
※最新の注目研究や他のバックナンバーはこちら
橋梁等の鋼構造物に吸着した状態で点検作業が可能なドローンの開発
日本には約72万橋以上の橋梁が架けられていますが、高度経済成長期に建造されたものが多く、その老朽化が社会的な問題となっています。一方で点検に必要な足場設置のコストが高く、点検技術を持った技術者が不足しているということもあり、必ずしも十分な点検が行われていないという現状があります。近年ではドローンの普及により高所での撮影も安全かつ容易になってきましたが、外観撮影が主たるタスクであり、構造部材内側の詳細な点検や超音波板厚測定など接触を伴う点検作業を実施することはできませんでした。また、撮影中は常にロータを回転させ続ける必要があるため、長時間の点検作業ができず、バッテリ交換を何度も行う必要があります。
私たちの研究グループでは図1のように、多くの橋梁に使用されているH形鋼(断面がH字形状をした鉄鋼材)に吸着し、ロータを停止した状態でH形鋼の内側などでも点検作業が可能なドローンの開発を行っています。
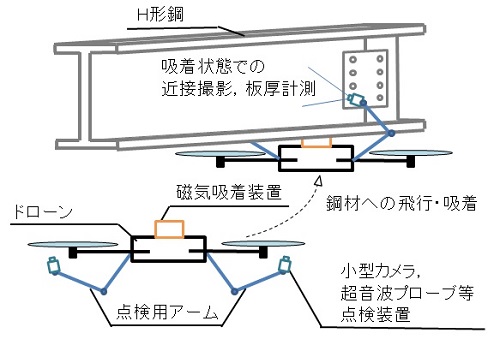
図1:鋼構造物に吸着可能なドローンによる点検のスキーム
EPMを利用した磁気吸着機構
エネルギー消費が少ない鋼材への吸着を考えた場合、永久磁石で吸着すると電力を消費せずに吸着できますが、強力な永久磁石で吸着すると引き剥がす際に大きな力が必要となります。一方で、電磁石を使用すると吸着・離脱の制御は容易ですが、吸着して点検している最中は常に電力を消費することとなります。そこでEPM(Electropermanent Magnet)と呼ばれる、永久磁石と電磁石の両方の特性を持つような吸着機構を使用しています。EPMは図2のようにアルニコ磁石、ネオジム磁石、コイル、ヨーク(Steel core)から構成されており、ネオジム磁石とアルニコ磁石の極性が同方向の場合は磁束がヨークから外に漏れ出て、鋼材などの磁性体に吸着することができます。この時、内部の永久磁石の磁力で吸着しているため吸着中は電力を消費しません。アルニコ磁石は周囲の磁界により極性を変化させることができるため、コイルにパルス電流を流し、アルニコ磁石の極性を変化させ、ネオジム磁石の極性と逆方向にすると、磁束が2つの永久磁石内で閉じるため吸着しない状態、つまり鋼材から離脱する状態になります。吸着・離脱の切り替えは瞬間的に流れるパルス状の電流により制御されるため、わずかな電力で切り替えが可能です。製作したEPM(図2右)はドローンに搭載するために約60gと小型ですが、最大で約300Nの吸着力を発揮することができます。
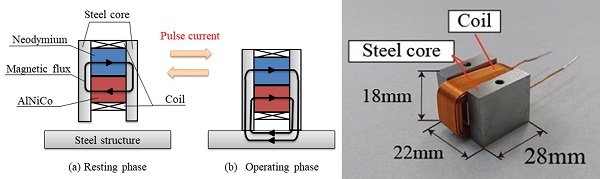
図2:EPMの離脱モード/吸着モード、製作したドローン用EPM
吸着時の信頼性を高める技術
人の手の届かない構造物に磁気吸着し、点検作業を行うためには、強い力で吸着し、吸着後にしっかりと吸着できているか否かを遠隔地から確認できることが重要です。EPMは永久磁石の極性が互いに反対向きである磁束が閉じた状態で吸着対象に接触し、密着した状態で極性を反転させて吸着可能なモードに切り替えた場合に高い吸着力を発生させます。そこで、吸着対象に接近した際にコイルに生じる誘導起電力を計測することで接触を検出し、吸着状態に切り替えるためのパルス電流を自動的に流すシステム(同グループの増田教授が開発、特許出願済)を搭載しています。またEPMの取り付け部にサスペンションを設置しており、接触時の衝撃を吸収し、対象に密着しやすい構造となっています。さらに吸着後にはEPM側面に取り付けたホールセンサにて漏洩磁束密度を計測し、その値に基づいて吸着力を推定するシステム(特許出願済)も搭載しており、wi-fi通信により作業者が遠隔地からスマートフォンなどの画面で吸着状態を確認することが可能です。
図3:磁気吸着システム全体像
ドローンによる鋼構造物への吸着
EPMを利用した磁気吸着システムを市販のドローンに搭載し、鋼構造物に吸着させた実験の様子が図4です。この実験で使用したドローンは幅、奥行きともに約0.78m、重量約2.4kgの機体です。手動操縦により鋼板に接近させ、鋼板に吸着後、約4kgのおもりを吊り下げることで飛行状態から吸着した場合でも十分な吸着力が発揮できることを確認しました。また、図5のように、やや大きめのドローンに吸着システムと近接撮影用カメラのついたアームを搭載し、防錆塗装が施された実構造物への吸着、構造部の近接撮影にも成功しています。
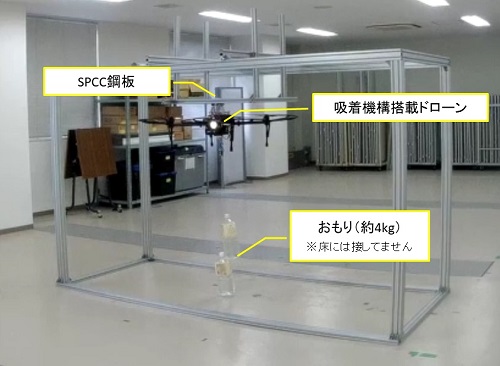
図4:磁気吸着システムを搭載したドローンの吸着力検証実験の様子

図5:実構造物への吸着及び近接撮影実験の様子(協力:株式会社シュルード設計)
GPSが使用できない環境でのナビゲーション技術
橋梁などの構造物下は屋内と同様にGPSの電波が受信できないため、位置制御に必要な位置情報を取得することができません。この問題の解決のためUWB(超広帯域無線)通信を利用し、構造物の下でも位置情報が取得できる空間を作り出す研究をしています。
アンカー(地上局)とドローンに搭載されたタグ(移動局)はUWB通信を行うことで、アンカーとタグの間の距離を計測することができます。複数のアンカーを構造物下に設置し、各アンカーとタグとの距離を計測することで、得られた距離情報と各アンカーの座標からドローンに搭載されたタグの3次元座標を計算することができ、空間内でのドローンの位置を把握することができます。現段階では約20cmの精度で位置を推定でき、この測位システムを小型ドローンに搭載し、自律飛行による3点移動を達成しています。
今後はこれらの要素技術を統合することで、高い操縦技術を持っていない作業者であっても容易に飛行させ、吸着した状態でバッテリの消費を気にせず、様々な点検作業が可能なドローンを実現できるよう研究を進めていきます。

図6 :UWB通信を利用した非GPS環境での測位とUWB通信デバイス
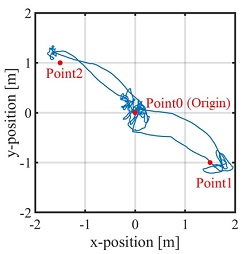
図7:UWB通信デバイスを搭載したドローンによる3点自律移動実験での飛行の軌跡
【主な発表論文】
- A Positioning System and Position Control System of a Quad-Rotor Applying Kalman Filter to a UWB Module and an IMU
著者名 : S. Nakamura, Y. Higashi, A. Masuda, N. Miura
掲載誌名 : Proc. of the 2020 IEEE/SICE International Symposium on System Integration
出版年月 : 2020年01月
巻・号・頁 : pp.747-752
- Reliable Activation of an EPM-Based Clinging Device for Aerial Inspection Robots
著者名 : A. Masuda, A. Tanaka, Y. Higashi, N. Miura
掲載誌名 : Journal of Robotics and Mechatronics
出版年月 : 2019年12月
巻・号・頁 : Vol.31, No.6, pp. 827-836, doi:10.20965/jrm.2019.p0827
オープンアクセス https://www.fujipress.jp/jrm/rb/robot003100060827/
- Development of an Aerial Inspection Robot with EPM and Camera Arm for Steel Structures
著者名 : S. AkahoriI, Y. Higashi, A. Masuda
掲載誌名 : Proc. of Region 10 Conference (TENCON), 2016 IEEE
出版年月 : 2016年11月
巻・号・頁 : pp.3542-3545
※最新の注目研究や他のバックナンバーはこちら
