注目研究の紹介 2022年6月
本学の注目研究を毎月1つずつ紹介します。
※最新の注目研究や他のバックナンバーはこちら
コントローラエリアネットワークの高速化・省線化技術の研究開発
コントローラエリアネットワーク(Controller Area Network, CAN)は、図1のように自動車内の電子制御ユニット(Electronic Control Unit, ECU)間のネットワークバスとして広く利用されています。自動車における運転支援等の機能を実現するためには、CANバスを通じて自動車内に偏在するECUに制御コマンドを配信する必要があります。将来の自動運転車では、CANバスは人における神経網に相当し、ECUに電力を供給する電力網は人における血管網に相当すると言えます。1つのCANバスに今まで以上に多機能なノードが多数接続するようになるため、CANバス上のデータレートの高速化が求められています。一方で、車体重量の軽減や車内スペースの確保のために、CANケーブルおよび電力線の削減による省線化が求められています。データレートの高速化とケーブルの省線化は相反する要求条件ですが、私共の研究室ではこの相反する要求条件を満たすべくCANの高速化および省線化に関する研究開発に取り組んでいます。

図1 コントローラエリアネットワーク(CAN)
CAN信号の伝送特性解析
図2はCAN信号の伝送特性をモデル化するために実施したCAN通信実験の写真です。23個のCANノードが一定間隔で接続したCANバスを模擬しています。写真のノートパソコンでは、CANバス上の計測信号が表示されています。パルス波形を伝送していますが、CANバス上の多数の分岐や多数の非終端ノードによりパルス波形にリンギングが発生している様子が分かります。CANバス上の信号の伝送特性を実験的に解析することにより、計算機上でCAN通信をモデル化することができ、さまざまな状況においてシミュレーションすることができます。

図2 CAN信号の伝送特性解析
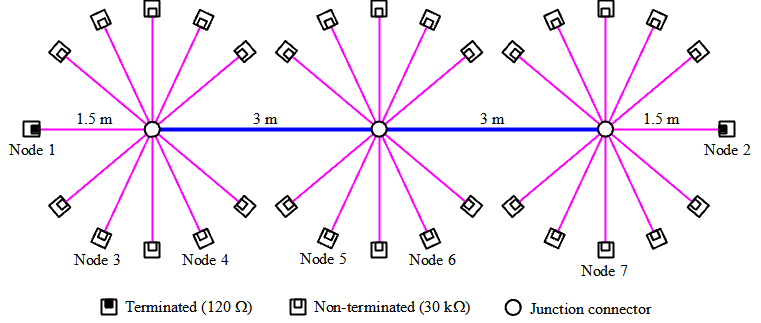
図3 CAN通信検証用のテストネットワーク
CANの通信方式の性能を評価および比較するために、自動車のフロント部、内装部、およびリア部を想定した3つの分岐点からそれぞれCANノードが多数接続した図3のテストネットワークをCAN通信検証のために用います。CANでは複数のノードから同時にパケットが伝送されたときにCANバス上でパケット衝突が生じますが、優先度が高いCANパケットが生き残る仕組みがとられています。CANパケットの先頭部分が含まれる調停フェーズでは低いデータレートで送信して送信ノードは自身の送信信号とCANバス上の信号とで不整合がないかどうかをチェックしています。不整合が検出されれば、自身の送信パケットは優先度が低いと判断して送信を停止します。調停フェーズで生き残ったパケットは、高いデータレートで情報を伝送するデータフェーズに入ります。車載ネットワーク用のCANの標準化規格では、データフェーズが2 Mb/sのときに通信ノード数の上限が24、データフェーズが5 Mb/sのときに通信ノード数の上限が2となっています。図3のテストネットワークでは、それらの通信ノード数の上限を越えた32個の通信ノードがあり、従来のCANによるシミュレーションではデータレート3 Mb/sから通信に常に失敗する送受信ノードペアが現れます。自動車内の制御コマンドの送受信失敗は人命にかかわりますので許容されるものではありません。
CAN通信ケーブルの省線化 – CAN/BCDPの提案
CANの伝送路符号はユニポーラNRZ (Non-Return-Zero)符号ですが、CANトランシーバを1つ追加することでデータフェーズにおいてバイポーラNRZ符号を実現するCAN/BCDP (CAN with Bipolar Coding in the Data Phase)を提案しています。図4に、CAN/BCDPにおけるノードアーキテクチャとシグナリングを示します。特に、データフェーズでは、レセシブ(ビット1)を伝送しているときにもローインピーダンスでありリンギングを抑制することができます。図5に、データレート6 Mb/sにてビット列“010101010111”を伝送しているときのCANとCAN/BCDPの送受信波形を示します。CANではドミナント(ビット0)を送信後のレセシブ(ビット1)に生じるリンギングが激しいため正しくビット列を受信できませんが、CAN/BCDPではリンギングが抑制されてビット列を正しく受信できます。波形解析の結果、提案CAN/BCDPではテストネットワーク(図3)におけるすべての送受信ペアに対してデータフェーズ1 Mb/sから10 Mb/sの範囲で正常なデータ通信が可能であることが明らかにされています。提案CAN/BCDPを用いることで、1つのCANバスに標準化規格を越えた数のCANノードを接続できることになり、CANにおける高速化と省線化のフィージビリティを提示しています。
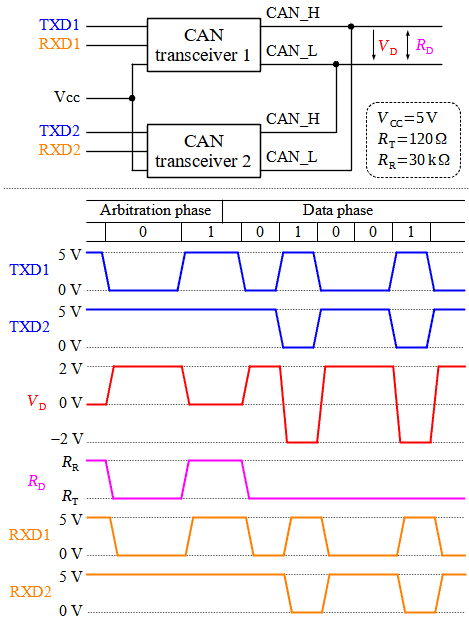
図4 CAN/BCDPにおけるノードアーキテクチャとシグナリング
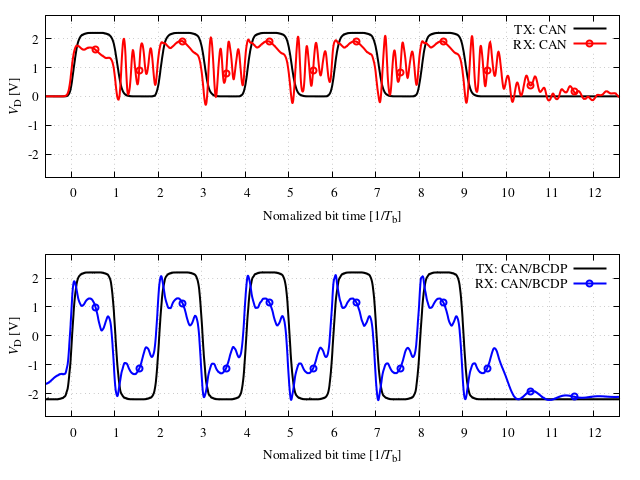
図5 データレート6 Mb/sにおけるCANとCAN/BCDPの送受信波形
電力ケーブルの省線化 – PoCAN の提案
自動車内のECUにはバッテリから電力線を介して直流12 Vで電力が供給されています。PoCAN (Power over CAN)では、CANケーブルに直流12 Vを重畳することで、情報と電力の同時配送を実現します。CANケーブルを介して給電することで、自動車内の電力網が削減できます。図6は、PoCANにおけるノードアーキテクチャとシグナリングを示しています。受信ノードにおける情報と電力の分離を実現するために、伝送路符号としてユニポーラNRZ符号ではなくバイポーラAMI (Alternate Mark Inversion)符号を採用しています。Markを表すドミナント(ビット0)を送るときに極性を交互に反転させるために、CAN/BCDPと同様、CANトランシーバを追加しています。データレート500 kb/sでの簡易なCANバスでの実証実験により、2つのノードが同時送信したときの調停機能が有効に働くことを確認しています。図7と図8はそれぞれ、データレート500 kbpsのテストネットワーク(図3)におけるPoCANデータとPoCAN直流電力の信号波形を示しています。図7より、送信ビット列“010101010111”が正しく受信されていることが分かります。図8より、CANバス上における直流12 VとCANトランシーバを駆動させる直流5 Vが観測され、データ信号を重畳した影響は見られません。
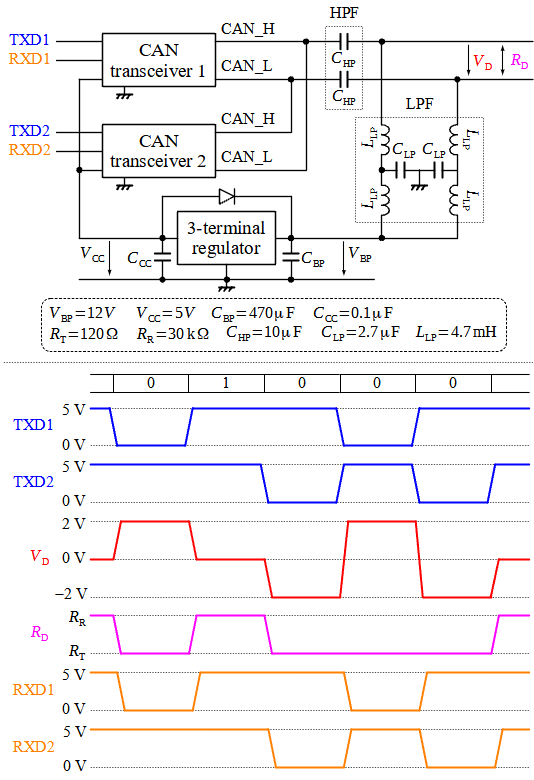
図6 PoCANにおけるノードアーキテクチャとシグナリング
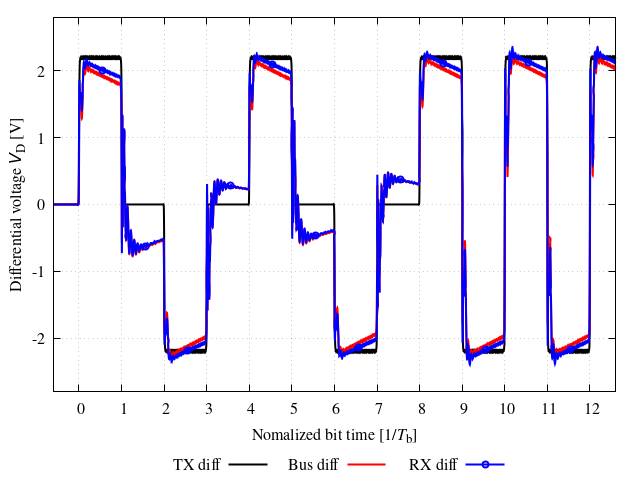
図7 データレート500 kb/sにおけるPoCANデータの送受信波形
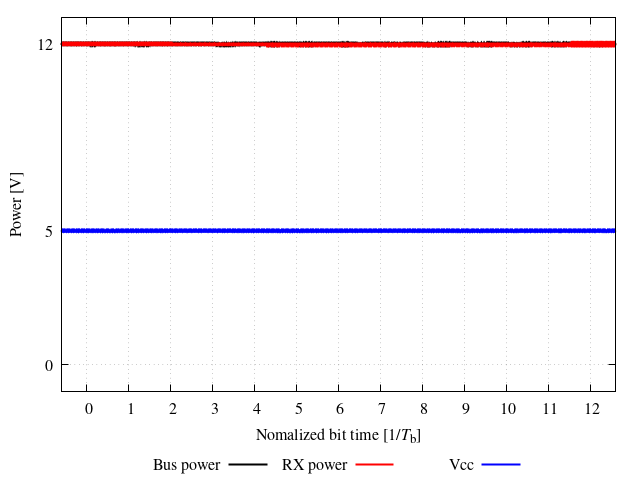
図8 データレート500 kb/sにおけるPoCAN直流電力波形
CAN/BCDPとPoCANは本研究室において独立に提案された方式でありますが、これらの方式はどちらもCANトランシーバを追加することでバイポーラ符号を実現しているため、CAN/BCDPとPoCANを統合した方式はデータレートの高速化およびCANケーブルと電力線の省線化を同時に実現できる可能性があります。
【主な発表論文】
- Daisuke Umehara and Takeyuki Shishido, “Controller Area Network and Its Reduced Wiring Technology,” IEICE Transactions on Communications, vol. E102-B, no. 7, pp. 1248-1262,
DOI: 10.1587/transcom.2018ANI0004, July 2019.
https://www.jstage.jst.go.jp/article/transcom/E102.B/7/E102.B_2018ANI0004/_article(フリーアクセス)
※最新の注目研究や他のバックナンバーはこちら